로봇 댄스 파티
로봇이 바닥을 굴러가고, 금속 손가락으로 물건을 집고, 심지어 공중제비까지 하는 걸 본 적 있지요. 그런데 그 금속 몸속에는 근육도, 뼈도 없어요. 그렇다면 로봇은 도대체 어떻게 움직이는 걸까요?
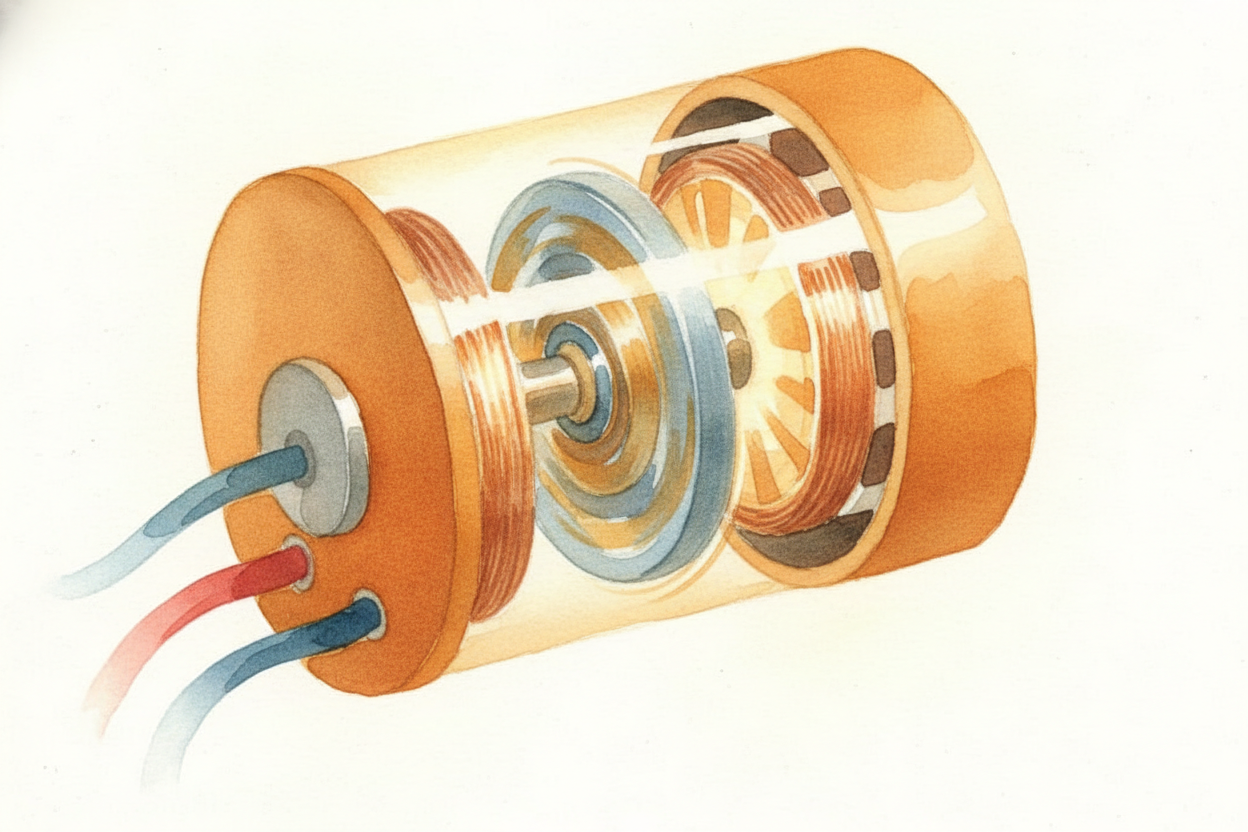
비밀은 전기 모터예요. 전기가 흐르면 빙글빙글 도는 작은 엔진이지요. 모터를 작은 회전목마라고 생각해 보세요. 전기가 모터를 빙글빙글 돌게 하고, 얼마나 많은 힘을 보내느냐에 따라 빠르게도, 느리게도 돌아요.
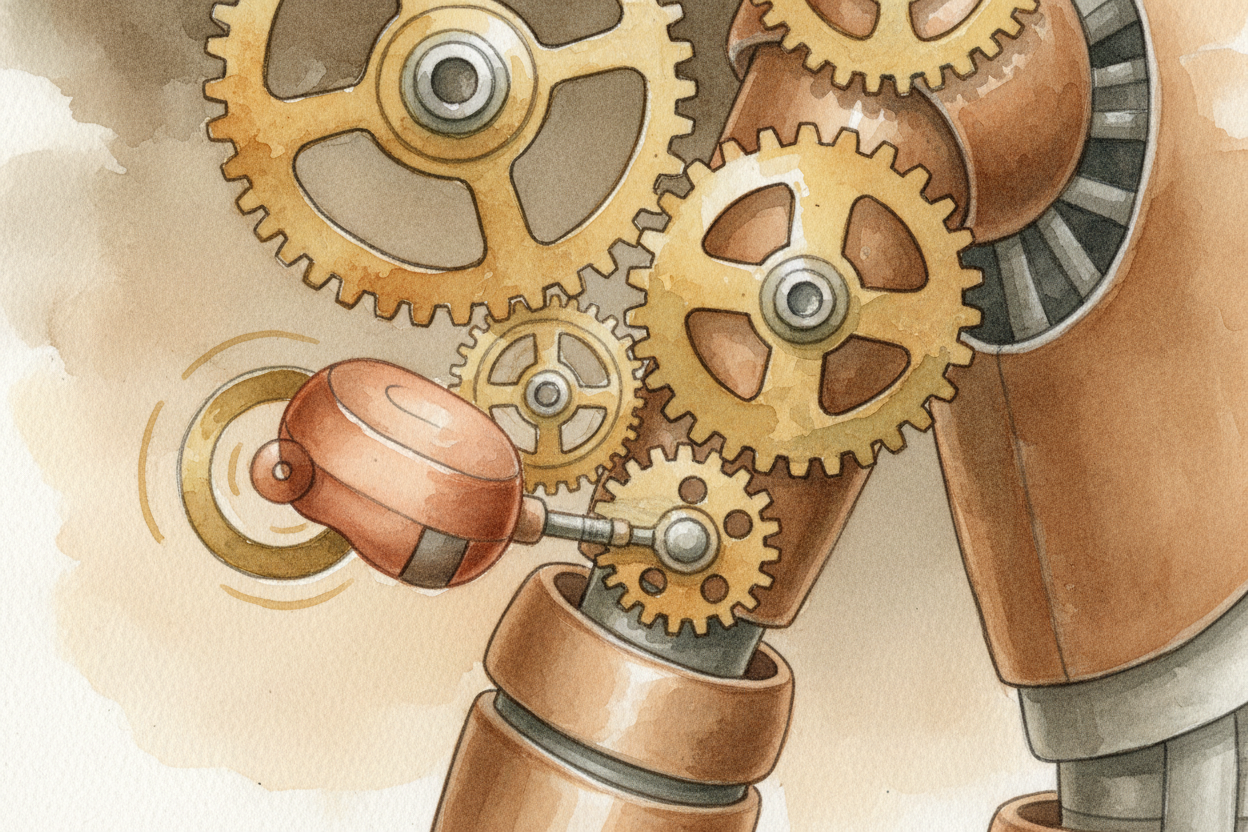
하지만 빙글빙글 도는 것만으로는 충분하지 않아요. 로봇의 팔이 굽혀지거나 다리가 앞으로 나아가게 하려면, 그 회전을 밀기, 당기기, 비틀기로 바꿔야 해요. 바로 여기서 톱니바퀴가 등장하지요. 톱니바퀴는 이가 달린 바퀴들이 서로 맞물린 것으로, 자전거의 기어를 바꾸듯 빠르고 약한 회전을 느리고 강한 힘으로 바꿔 줘요.
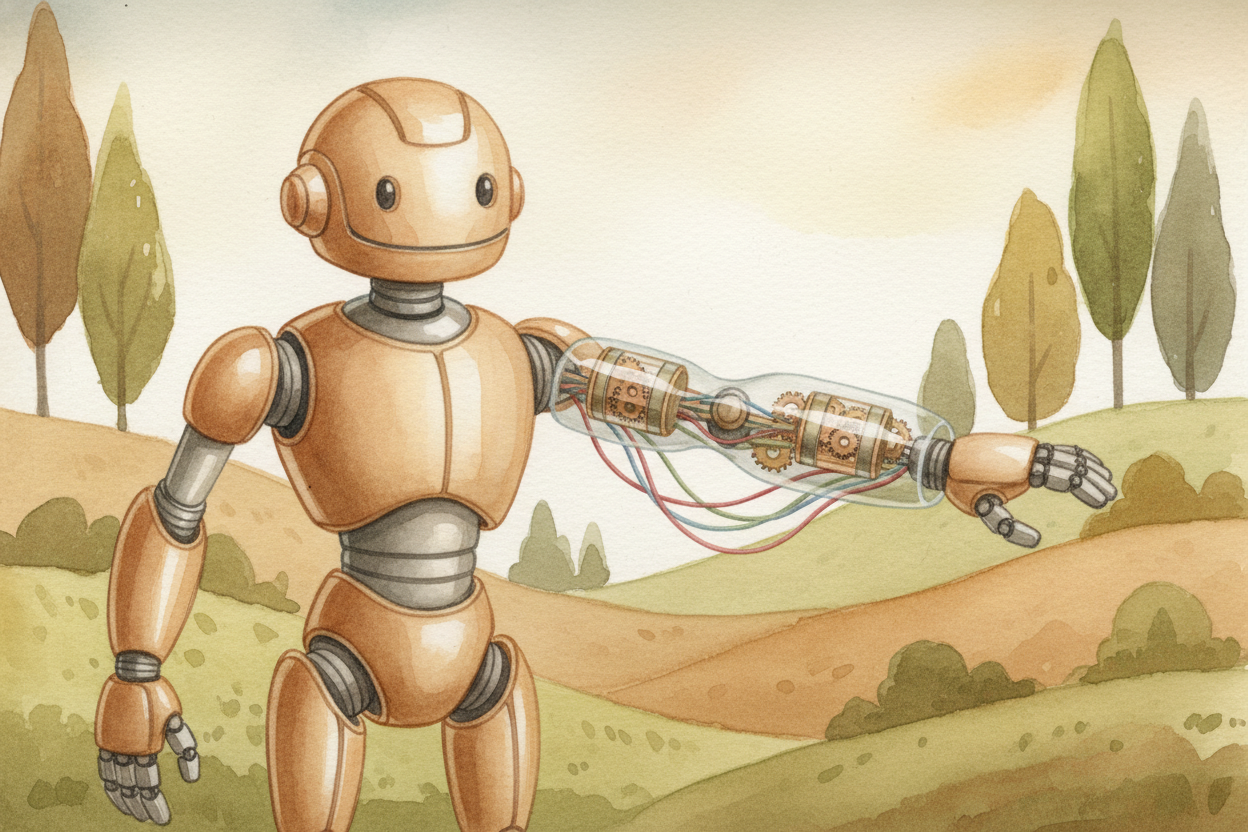
모터와 톱니바퀴를 함께 쌓아 놓으면 서보가 돼요. 서보는 로봇의 인공 근육이에요. 서보에게 "45도 돌아가"라고 말하면, 곧바로 그대로 움직이고, 다른 명령을 할 때까지 그 정확한 각도를 유지해요. 로봇 안에는 서보가 가득해요. 손가락 관절마다, 무릎마다, 어깨마다 하나씩 들어 있지요.
이리저리 빠르게 움직여야 하는 로봇에게는 바퀴가 아주 좋아요. 하지만 바퀴는 옆으로 향한 모터일 뿐이에요. 모터가 축을 돌리고, 축이 바퀴를 돌리면, 바퀴와 땅 사이의 마찰이 로봇을 앞으로 밀어 줘요. 두 바퀴가 서로 다른 속도로 돈다면? 로봇은 방향을 틀어요.

가장 멋진 로봇들은 다리로 걸어요. 그런데 이건 훨씬 더 어려워요. 흔들리는 장대 두 개 위에서 균형 잡기 놀이를 하는 것과 비슷하거든요. 각 다리에는 엉덩이, 무릎, 발목에 서보가 있고, 이 서보들이 짜 맞춘 춤처럼 차례차례 움직여요. 로봇의 컴퓨터는 센서를 끊임없이 확인해요. "내가 왼쪽으로 기울고 있나? 오른쪽 발목 서보를 움직여. 너무 앞으로 갔나? 무릎을 굽혀."

어떤 로봇들은 다리를 아예 쓰지 않고 뱀처럼 미끄러져 가요. 유연한 등뼈를 따라 수십 개의 작은 서보를 사용하는 거예요. 각 마디가 조금씩 굽혀지고, 그 물결이 몸을 따라 아래로 이동해요. 그러면 땅이 반대로 밀어 주고, 로봇은 앞으로 미끄러져 나아가요. 진짜 뱀이 쓰는 것과 같은 방법이지만, 근육 대신 전기의 힘으로 움직인답니다.

그러니 로봇이 구르든, 걷든, 날든, 뱀처럼 기어가든, 답은 같아요. 전기 모터가 회전하고, 톱니바퀴가 힘을 키우고, 서보가 모든 것을 정확한 위치에 놓고, 컴퓨터가 전체 기계 오케스트라를 지휘하는 거예요. 마법이 아니라, 전기와 금속, 그리고 아주 똑똑한 공학이랍니다.